Advance education resource for TTRobotix RoboHero. include:.
- Arduino Compatible
- Scratch
- Http API

Follow these steps you can programming your RoboHero By Arduino IDE.
How To Programming RoboHero By Arduino:
Control RoboHero via MIT education programming language: Scratch.
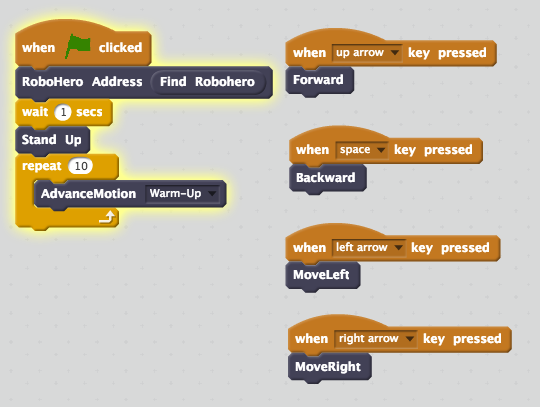
How To Control RoboHero Scratch Plugin page:
Control RoboHero with HTTP API
RoboHero address is http://192.168.4.1/ default, if you disable Wifi ap mode (see for more information), your address will be http://robohero.local/ .
http://192.168.4.1/controller?pm=?
| Motion | pm |
|---|---|
| Stand | 99 |
| Forward | 1 |
| Backward | 2 |
| MoveLeft | 5 |
| MoveRight | 6 |
| TurnLeft | 3 |
| TurnRight | 4 |
| Stand UP | 11 |
| Get UP | 12 |
http://192.168.4.1/controller?pms=?
| Motion | pms |
|---|---|
| Bow | 1 |
| Pass | 2 |
| Strength | 3 |
| Attention | 4 |
| Balance | 5 |
| Warm-Up | 6 |
| Clap | 7 |
| Pray | 8 |
| Dance | 9 |
Running a embed motion in RoboHero will block http service until motion is done.
http://192.168.4.1/controller?servo=?&value=?
| Params | Description |
|---|---|
| servo | the index of servo 0 ~ 15 |
| value | the degree of servo 0 ~ 270, take care of servo may block each other |
http://192.168.4.1/controller?gpid=?&value=?
| Params | Description |
|---|---|
| gpid | head servo connect at gpio 12, note it's 'gpid' not 'gpio' |
| value | the degree of servo 0 ~ 270, take care of servo may block each other |
RoboHero's motion data is a JSON text, echo motion has multiple frame-array, each frame has 17 servo and 1 running time (in ms). You can generator share link from app, share to your Facebook or Friend.
motion data Sample:
{
name: "test motion",
motion: [
[102,129,141,116,107,97,200,116,154,60,173,137,200,198,118,119,90,102],
[134,135,87,74,151,97,200,116,154,60,173,137,200,198,118,119,90,79],
[152,137,93,76,155,97,200,116,154,60,173,159,199,194,130,146,90,118]
]
}open http://api.ttrobotix.com/motion/129 from phone and you can import this motion to your app from url.
http://192.168.4.1/online?m0=?&m1=?&m2=?&m3=?&m4=?&m5=?&m6=?&m7=?&m8=?&m9=?&m10=?&m11=?m12=?&m13=?&m14=?&m15=?&m16=?&t1=?
App execute motion thought this api, send first frame and wait for t1, and send second frame ... until last frame.
| Params | Description |
|---|---|
| m0 | Servo 0 degree, left leg |
| m1 | Servo 1 degree, left leg |
| m2 | Servo 2 degree, left leg |
| m3 | Servo 3 degree, left leg |
| m4 | Servo 4 degree, left leg |
| m5 | Servo 5 degree, left hand |
| m6 | Servo 6 degree, left hand |
| m7 | Servo 7 degree, left hand |
| m8 | Servo 8 degree, right hand |
| m9 | Servo 9 degree, right hand |
| m10 | Servo 10 degree, right hand |
| m11 | Servo 11 degree, right leg |
| m12 | Servo 12 degree, right leg |
| m13 | Servo 13 degree, right leg |
| m14 | Servo 14 degree, right leg |
| m15 | Servo 15 degree, right leg |
| m16 | Servo 16 degree, head |
| t1 | Frame running time in ms |
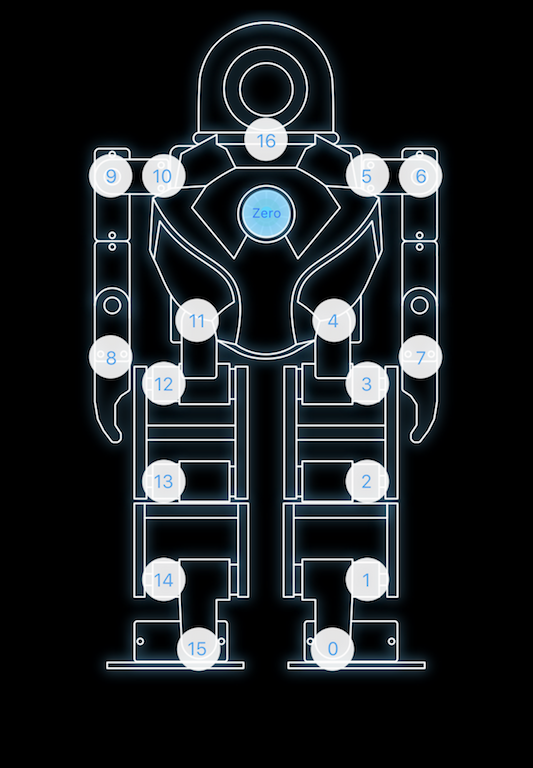
Servo index reference: