本パッケージはSEED-Moverを自律移動させる際に必要となる、
移動目標ポイント(waypoint)の追加/編集/削除ができるGUIツールです。
task_programmerに依存しています。 事前に同パッケージの環境構築を実施して下さい。
- 自律移動に必要なプログラムを起動(下記はシミュレーションで実行する場合の例)
roslaunch task_programmer simulation.launch - waypointを管理するノードを起動(1.のlaunchファイルに記載している場合は不要)
rosrun seed_rviz_plugin wp_marker_manager_node - RVizの起動
roslaunch task_programmer view.launch - RVizの設定追加(事前設定されている場合は不要)
-
InteractiveMarkersの追加
Addボタン->By topicから/wp_markerのInteractiveMarkersを選択->Show Descriptionsのチェックを外す
-
PointList Panelの追加
Panels->Add New Panel->seed_rviz_pluginのPointListを選択->PointListパネルをドラッグ&ドロップでRViz画面左に全面表示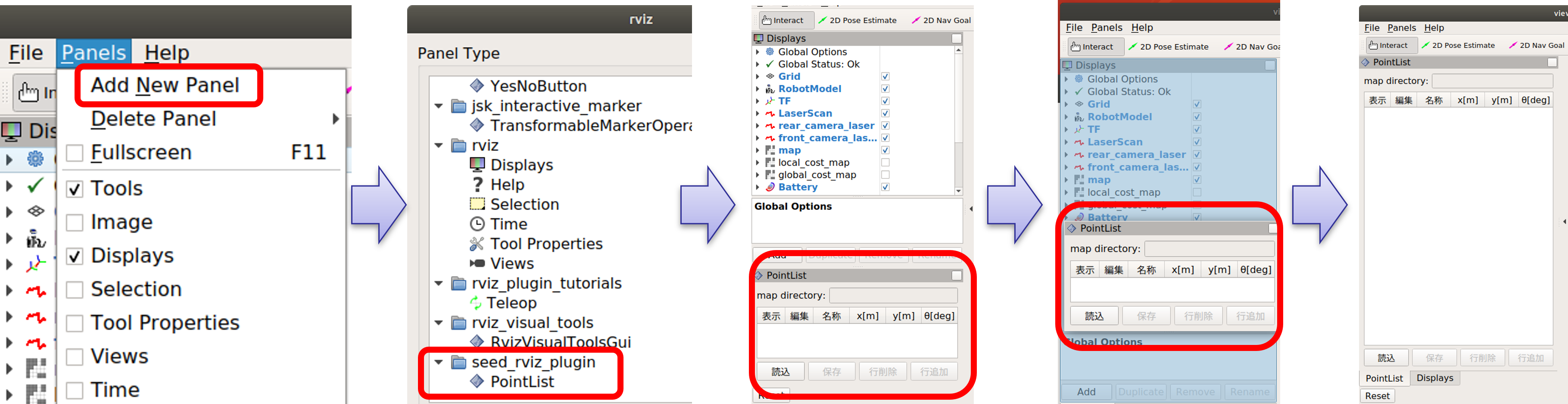
-
-
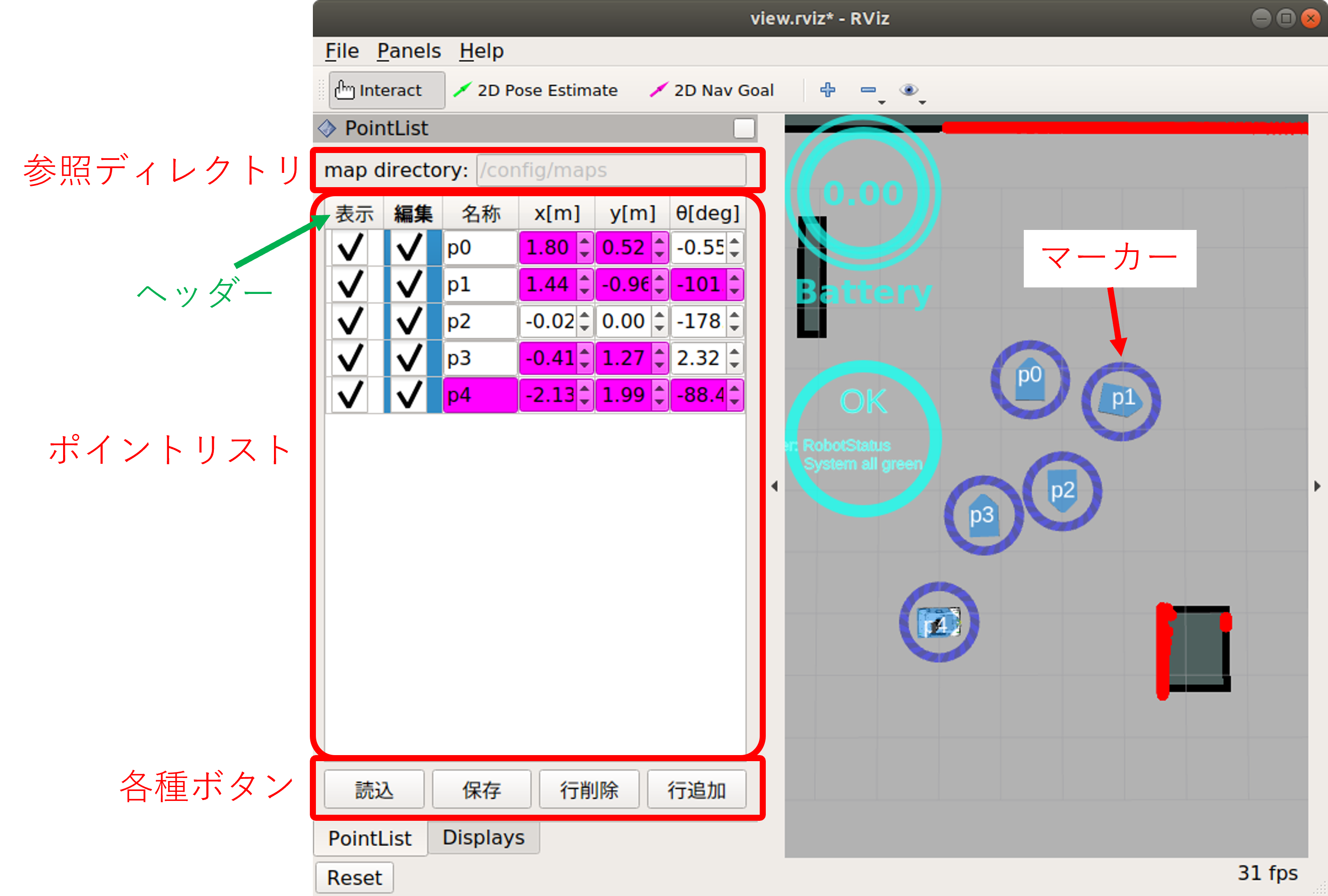
参照ディレクトリ
読込ボタンを押したときに設定される、ポイントの読込/保存先ディレクトリが表示されます。
初期設定は/config/mapsで、{task_programmerのディレクトリ}/config/maps/waypoints.yamlに記述されているYAML形式のファイルを扱います。参照ディレクトリはrqt_reconfigureで管理されており、地図の読込時や切替時に自動で設定されます。
-
ポイントリスト
読み込んだポイント、編集中ポイントの一覧が表示されます。
表示にチェックを入れるとRViz上にマーカーが表示され、編集にチェックを入れると編集可能となります。
(表示にチェックが入っていないと、編集もチェックを入れられません)
表示もしくは編集のヘッダーを選択すると、全てのチェックボックスがONもしくはOFFされます。数値は直接入力かマウススクロール/矢印キーで変更できます。
編集された名称や値は背景色が変わり、同時にRViz上のマーカーにも反映されます。
-
マーカー
ポイントリストのデータを基にInteractiveMarkerで表示されます。編集にチェックが入っている場合、マーカー中心部をドラッグ&ドロップすることで位置を変更でき、
周りのリングをドラッグ&ドロップすることで姿勢を変更できます。
マーカー情報はポイントリストにも反映されます。
-
読込ボタン
登録されているポイントデータを読み込みます。
読込ボタンを押すと、他のボタンも選択可能になります。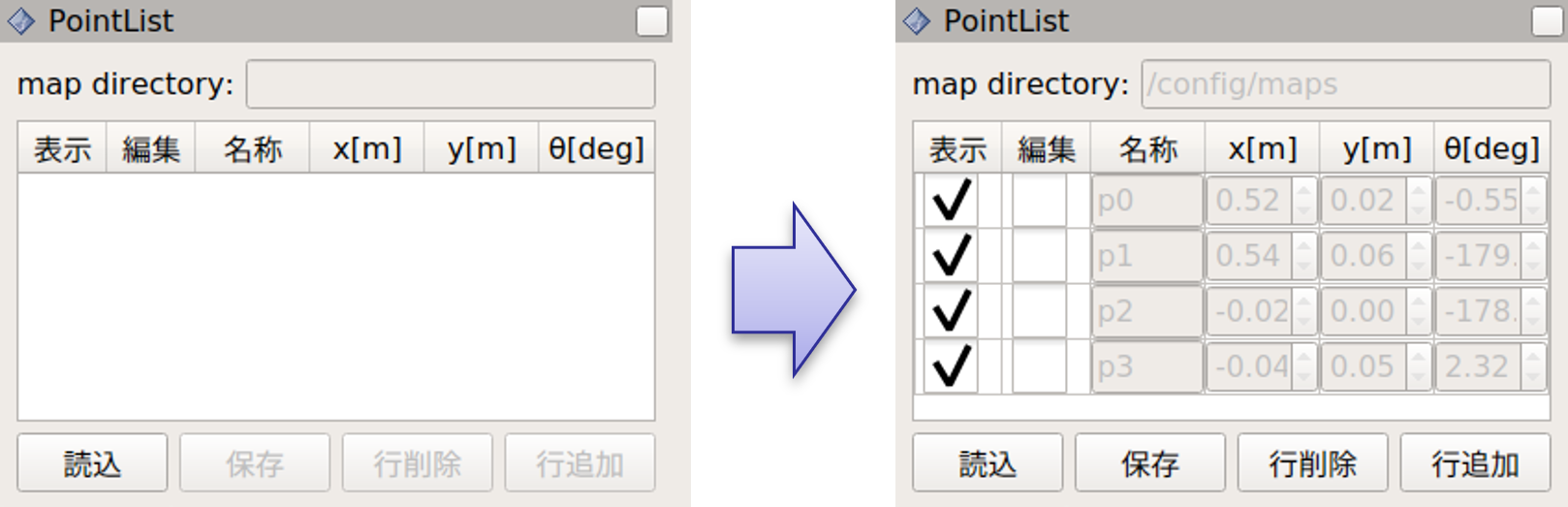
-
保存ボタン
ポイントを保存します。
リストに表示されているポイント情報をwaypoints.yamlに上書きします。 -
削除ボタン
ポイントを削除します。
ボタンを押すと、ポイント名一覧が記載されたポップアップが表示されます。
任意のポイントを選択してOKボタンを押すと、選択したポイントが削除されます。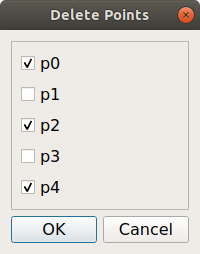
-
行追加ボタン
ポイントを追加します。
ボタンを押すと、ロボットの現在位置がポイントリストに追加されます。