Probabilistic Cell Decomposition method implemented for the Open Motion-Planning Library (OMPL) [1].
PCD is a path planner made for high-dimensional static configuration spaces. [2] Some code has been adapted from a previous implementation found here.
An example of a planned path:
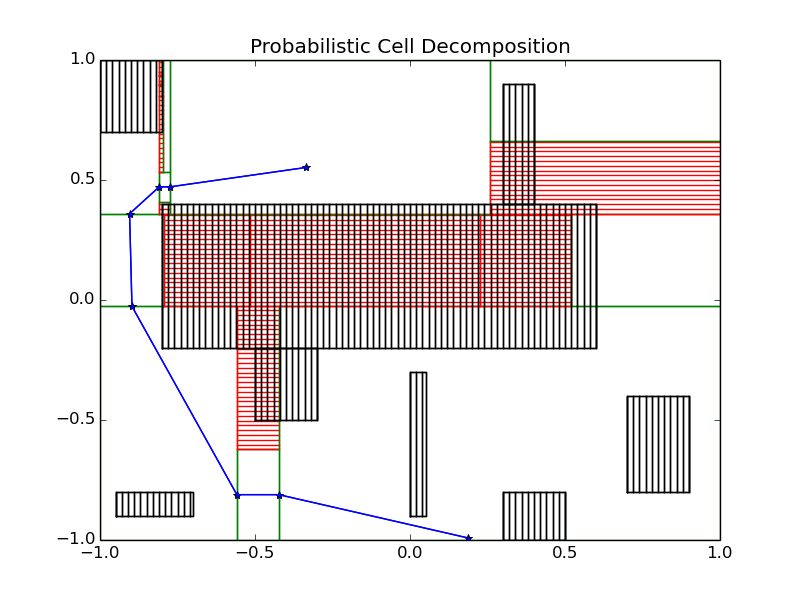
The computed cells are shown in red and green. The real obstacle is shown striped (black). A path found from this decomposition is shown in blue.
